Pyxis
Pointing in the right direction
Overview
Pyxis is the second of the new generation of rockets developed to compete in the European Rocketry Challenge in Portugal. With its innovative and ambitious design, it leaps to the previous rocket Lynx, thanks to its main features:
- Scientific Payload (1U CubeSat)
- Guided Parafoil for Payload Recovery
- Glass and Carbon Fibre Fuselage
- Advanced RF System
Pyxis will prove that last year success wasn’t mere luck by competing once again in the ‘Solid COTS 3000m’ category
EuRoC 2022 Results
Ranked
st
Technical Award
for the best technical report
ANACOM Award
for the best spectrum
200/200 points
score for team play
350/350 points
score for flight performance
1.1 %
error from the target apogee
3033 m
apogee official result
3006 m
apogee measured by SRAD electronics
Euroc Flight
Pyxis finally took to the skies of Portugal as the first launch of EuRoC 2022 on the 13th of October.
It reached an apogee of 3033 m as measured by the official logging altimeter, but our SRAD flight computer, where the control algorithms are actually run, measured an even closer value of 3006 meters.
After that, Pyxis nominally deployed its parachutes including the autonomously guided parafoil and landed softly without a scratch, marking the full score in its category and winning the EuRoC award.
specs
Cesaroni Pro98
M1520-P
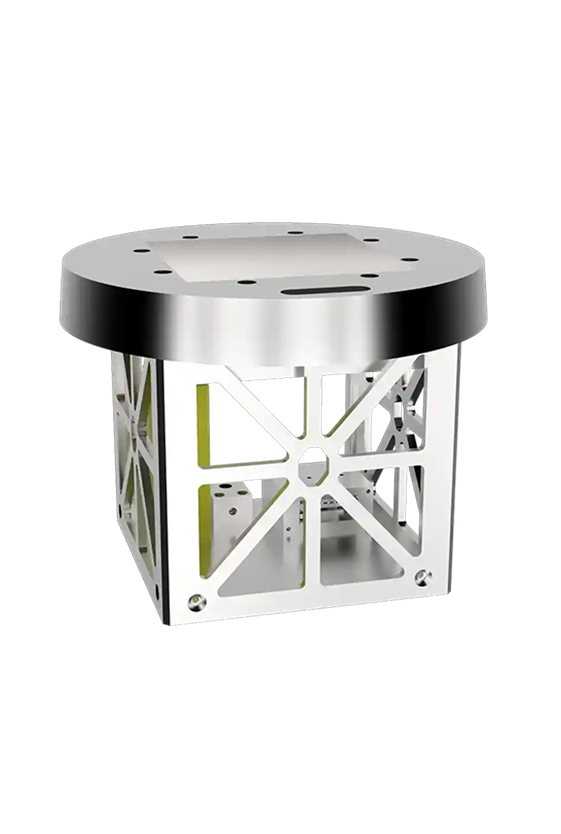
GLASS AND CARBON FIBER FUSELAGE
With the aim of reducing the weight of the rocket we decided to implement glass and carbon fibers fuselages. This allows us to buy a smaller (and cheaper) motor for Pyxis, and facilitate the development of our own hybrid engine.

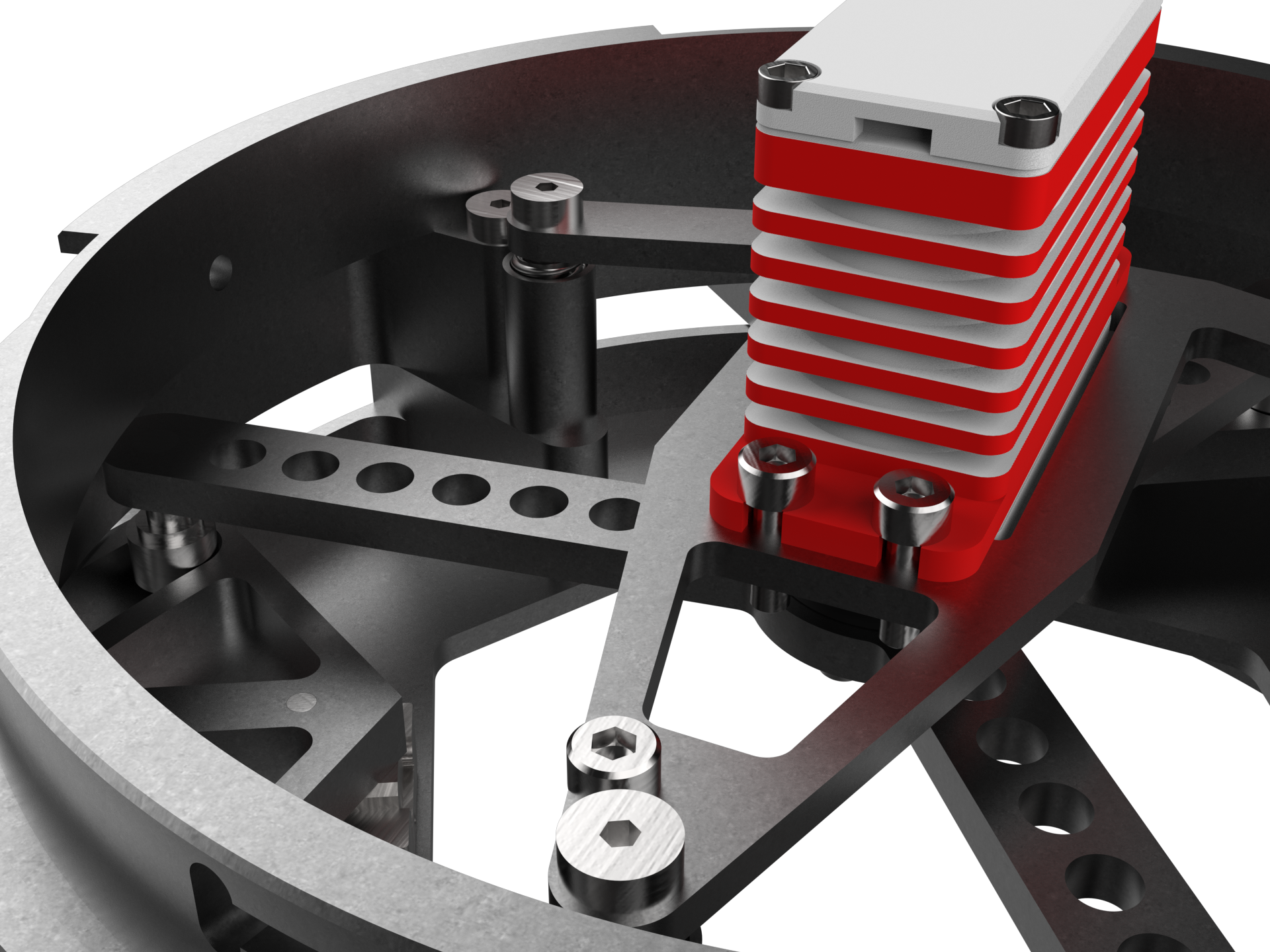
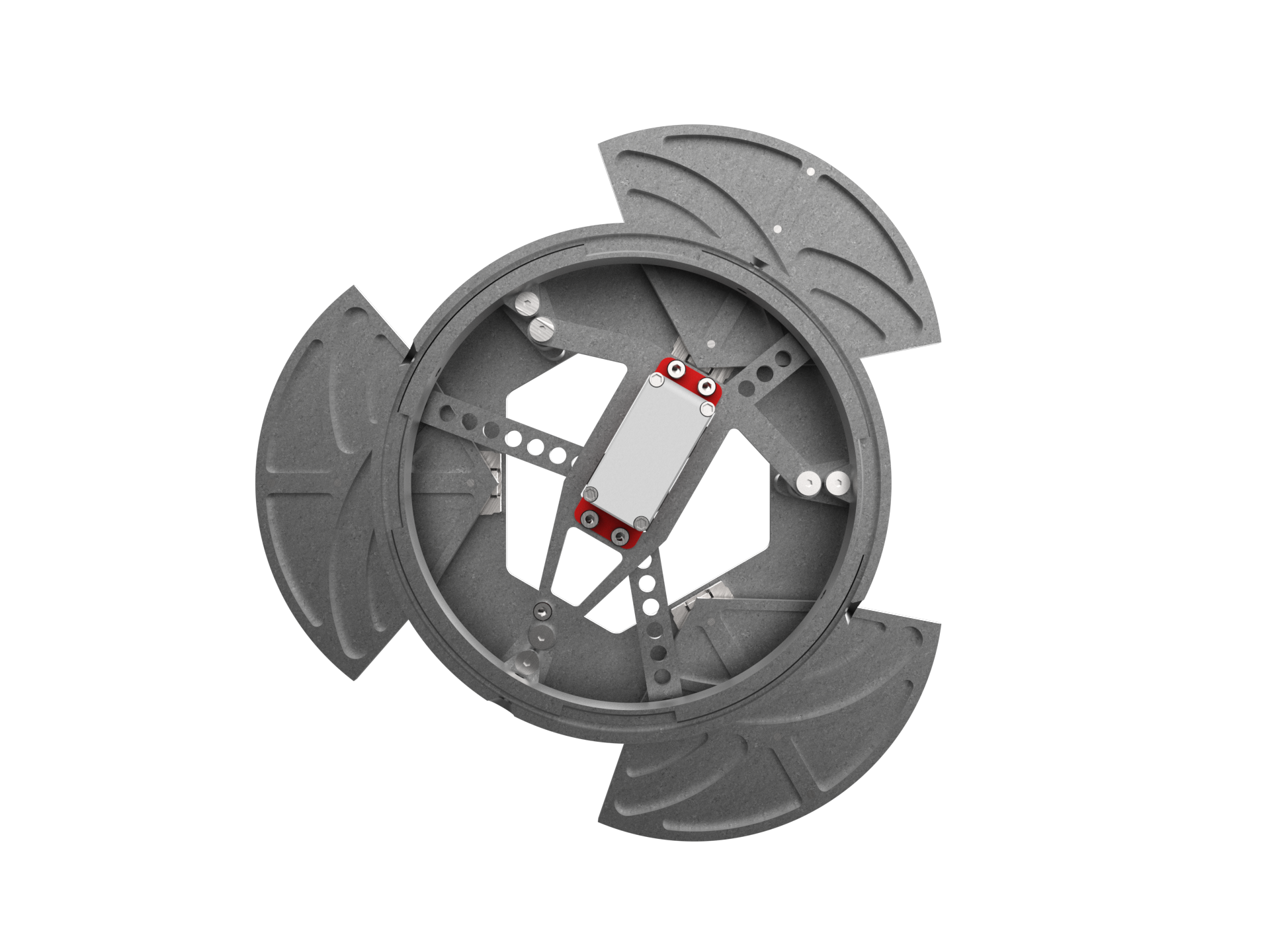
Air brakes
In order to precisely reach the target apogee of 3000m, Pyxis uses an air brakes system to precisely control its speed.
During the flight, three aerodynamic surfaces are extented from inside the fuselage, controlled by a complex control algorithm that is capable of predicting how high the apogee will be, based on measurements from the onboard sensors, thus adjusting the trajectory of the rocket in real time.
Telemetry RF System
The telemetry RF System comes brand new for Pyxis.
The main telemetry comes with double transceivers at different frequency that were designed to have high speed data and redundancy. The octagon antenna array is the key for long range communication, with multiple GPS antennas to get a faster fix, n°4 UHF antennas for long and reliable link, and 5.8 GHz antennas arrays for high speed data link. Everything is “wrapped around” with the result of an omnidirectional pattern with low ripples.
The payload telemetry was designed to be compact and bulky. With 868 MHz band, the transceiver can be programmed to stream data according to the needs, and send position during the descent with an integrated antenna in the parafoil. The GPS payload antenna is hidden during the ascend, but will face upwards after the nosecone separation, to maintain the best line of sight with the satellites.


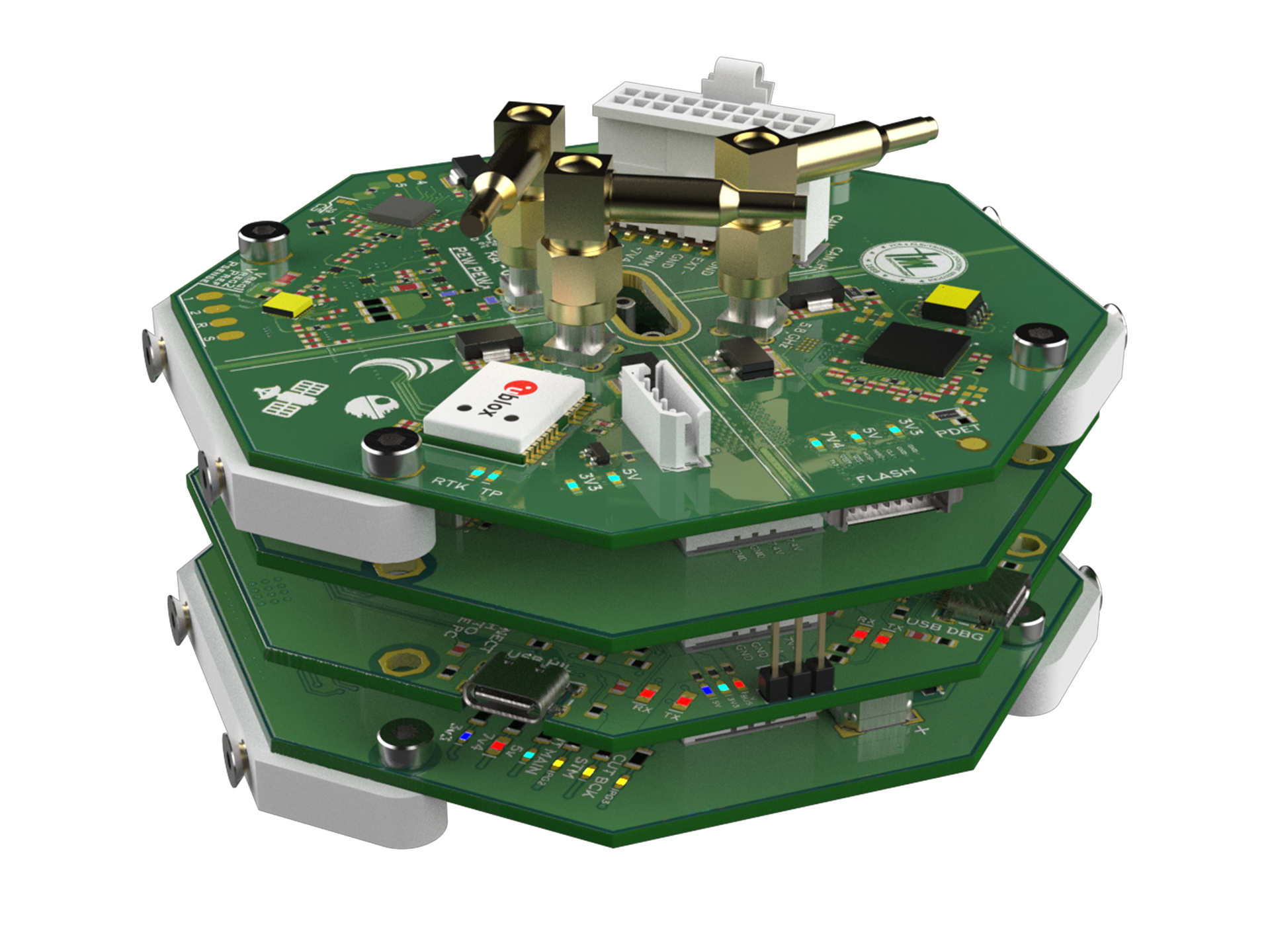
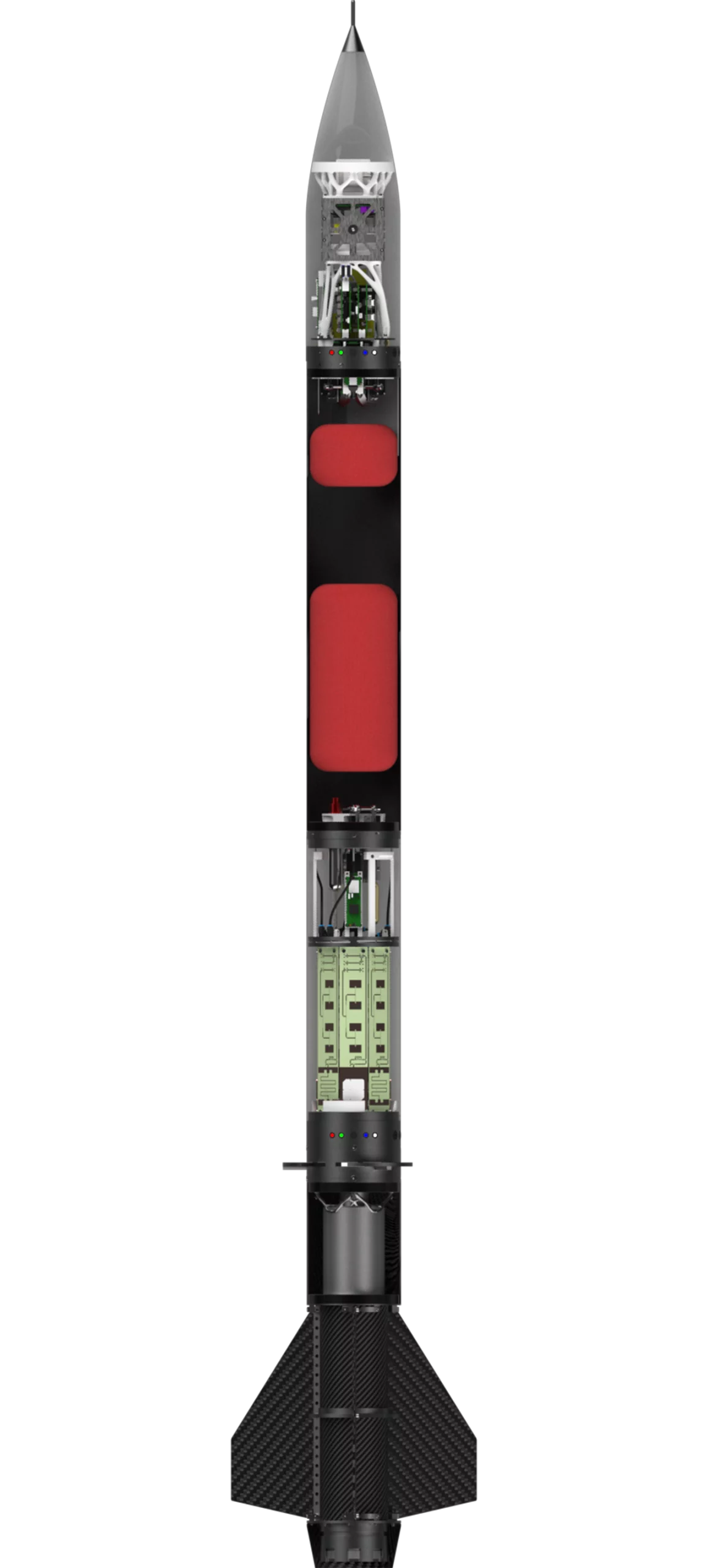
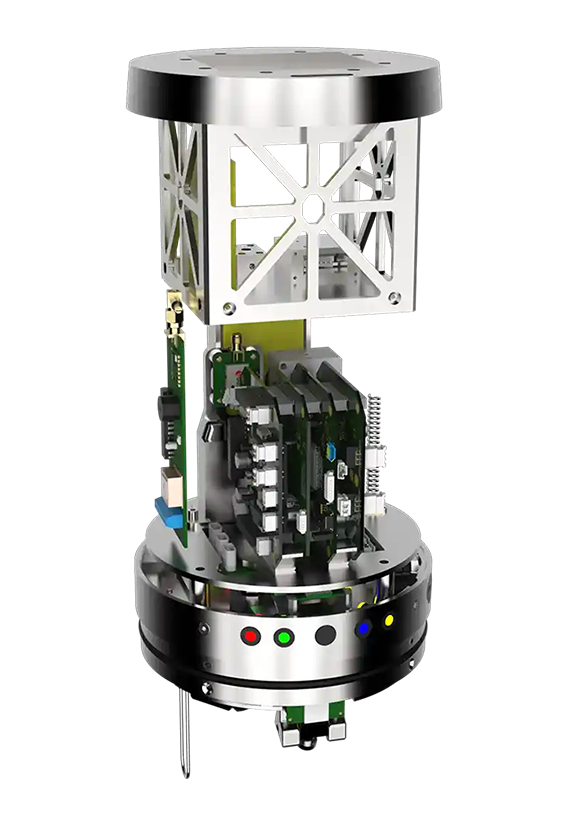
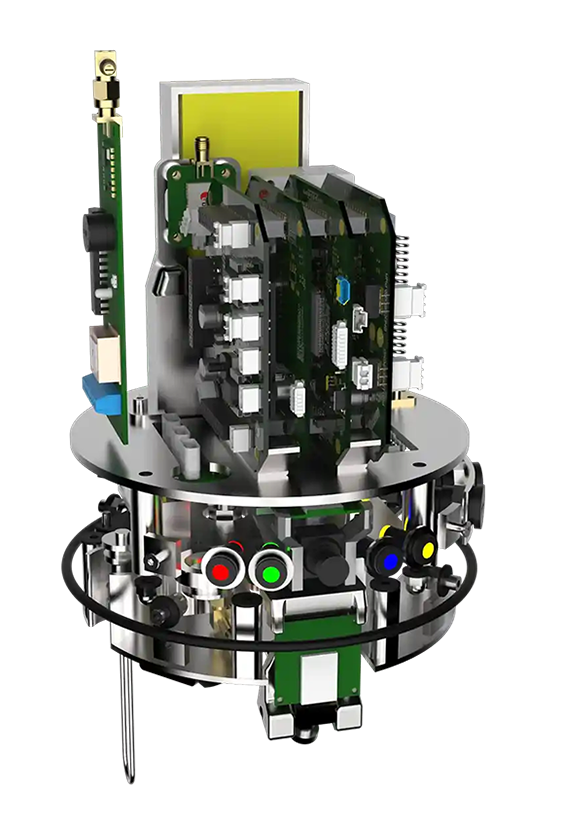
death stack
The death stack is Pyxis’ main flight computer, completely designed in house by the team.
It is composed of four boards:
- The “Power” board, providing power to the stack, airbrakes and recovery systems
- The “STM” board, the brain of the stack, sporting a powerful STM32F4 microcontroller with 8 MB of RAM
- The “RF + IMU” board, with an Xbee SX868 module used for sending vital telemetry to the ground, and multiple 9 Axis Inertial Measurement Units
- The “Analog” board, with an ADC and many absolute and differential pressure sensors used to measure altitude and velocity of the rocket.
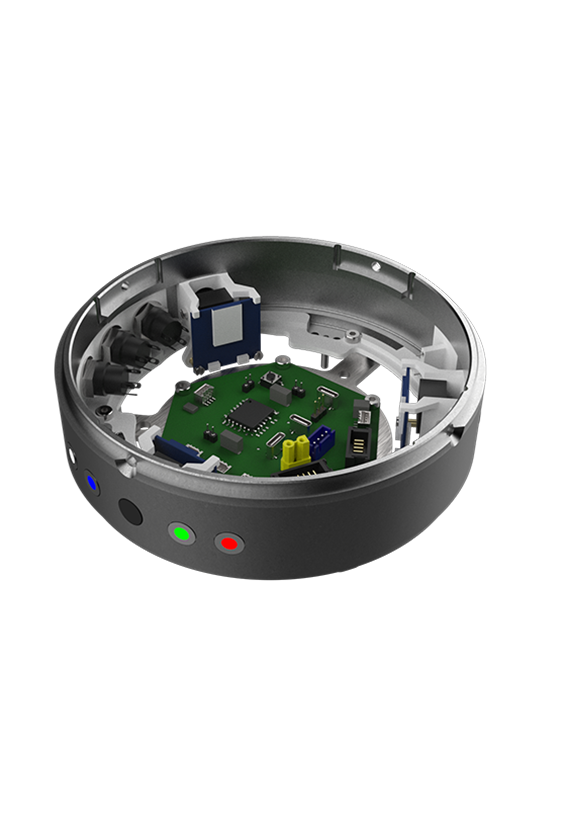
SCIENTIFIC PAYLOAD
The scientific payload is developed in collaboration with the “Cigna-Baruffi-Garelli” High School in Mondovi (CN – Italy), whose students will use and program innovative IoT modules to gather data during our flight, that will be implemented in the electronics, developed by the Electronics Department, that is responsible for controlling the descent of the nosecone.
Moreover, part of the 1U Cubesat will be used to validate some design concepts for our future rockets.

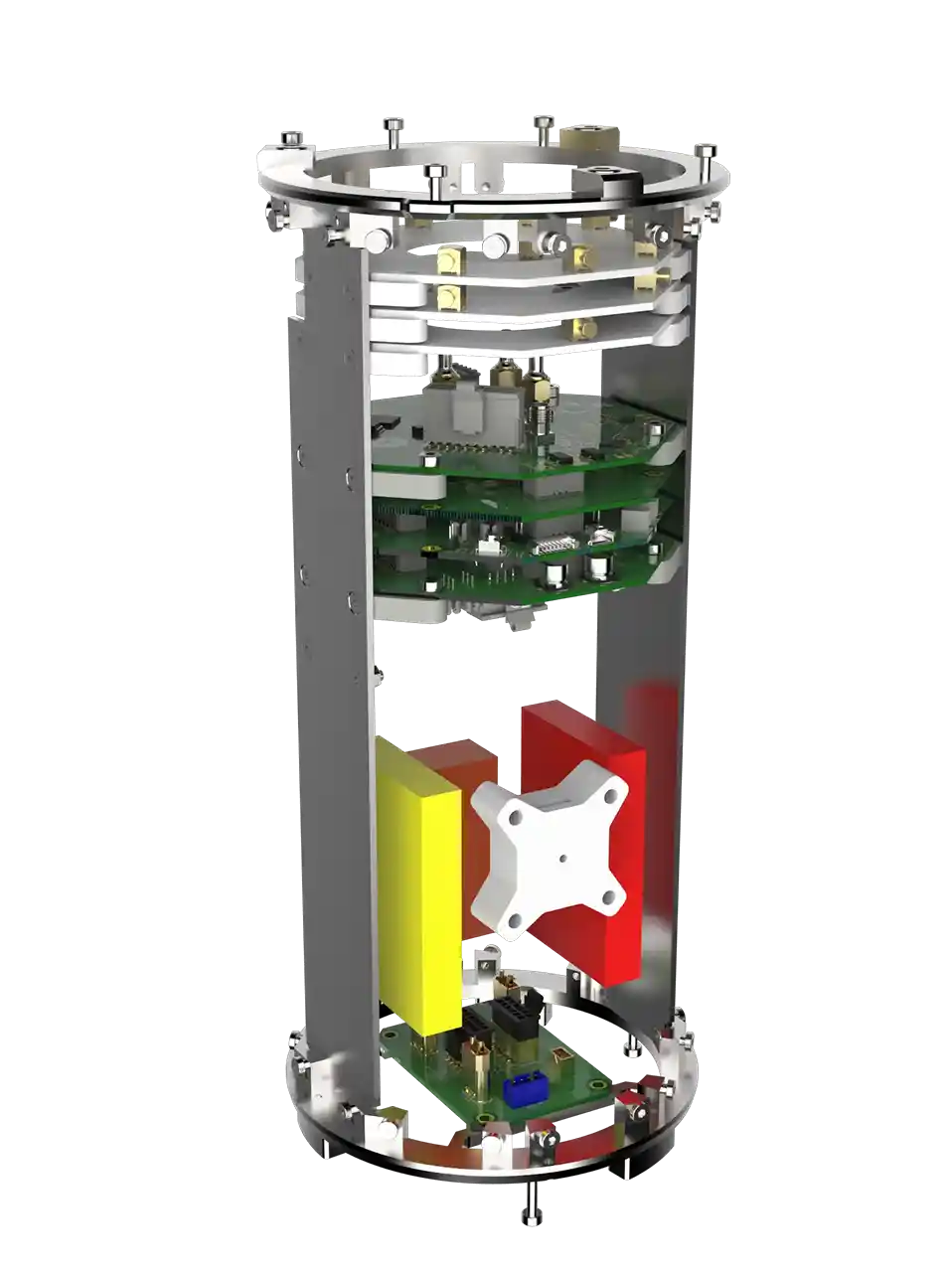
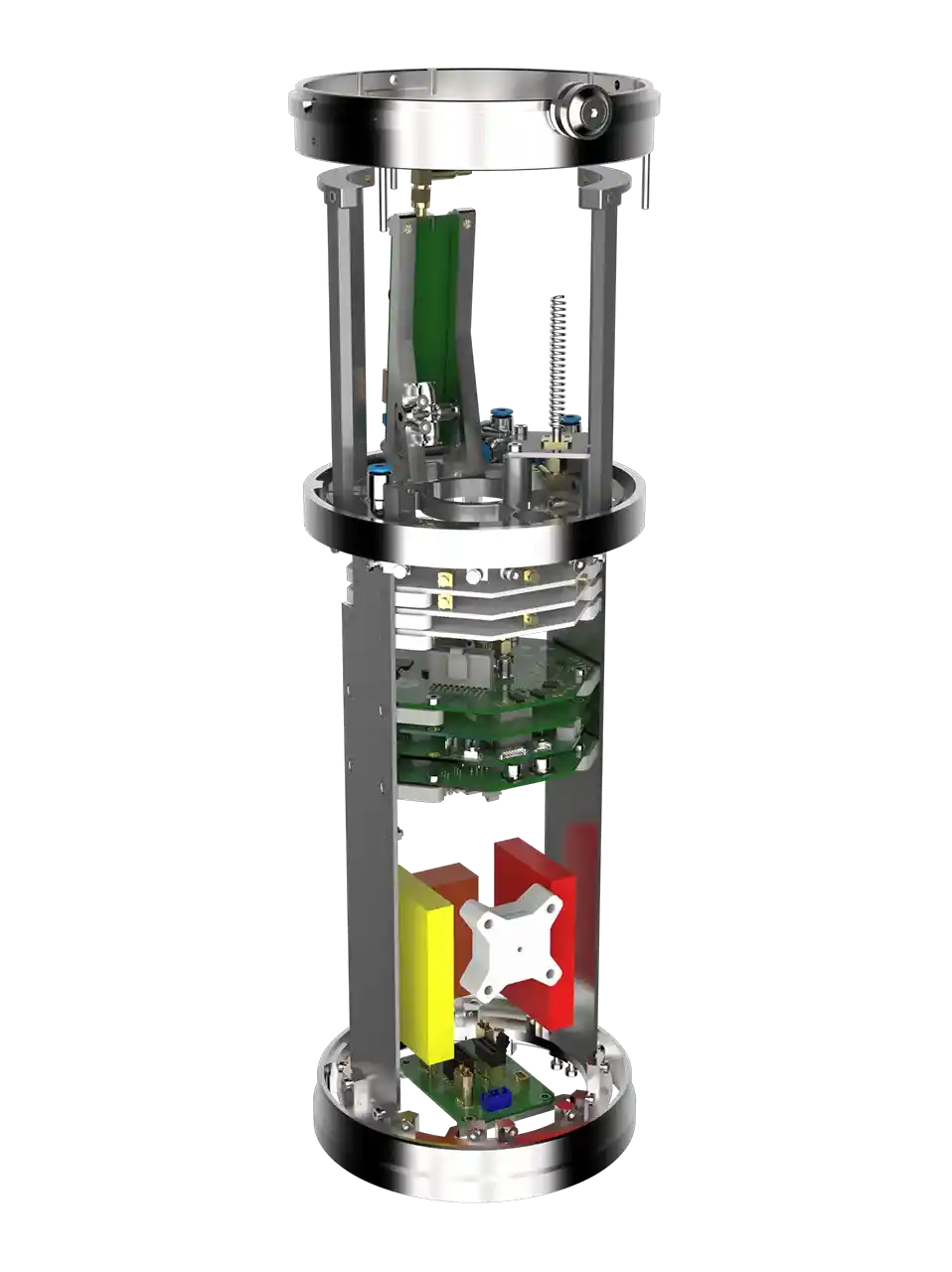
GUIDED PARAFOIL
Once the defined apogee is reached, the nosecone, containing the payload bay, is ejected. Its recovery is carried out by a parafoil whose descent is controlled autonomously by a set of actuators, leading the nosecone to land in a pre-defined area.
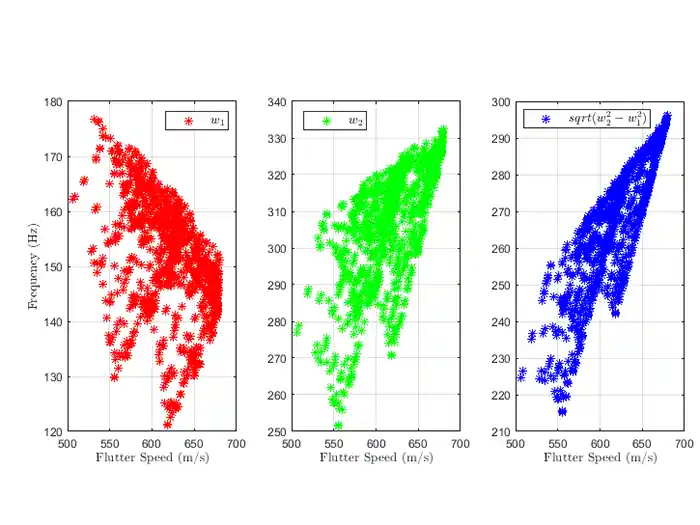
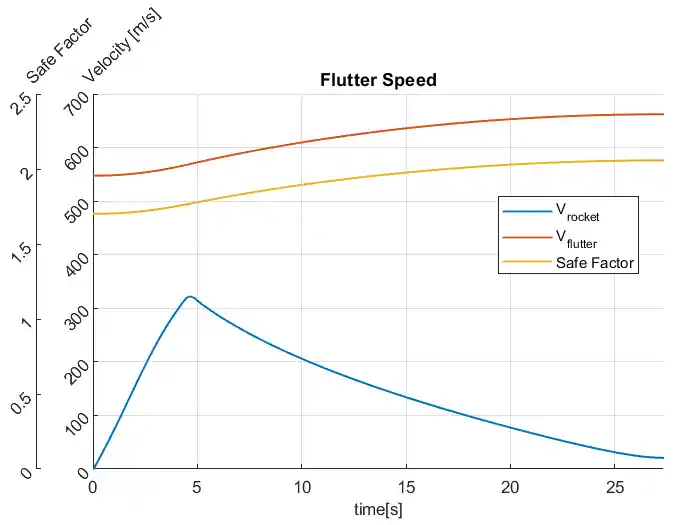
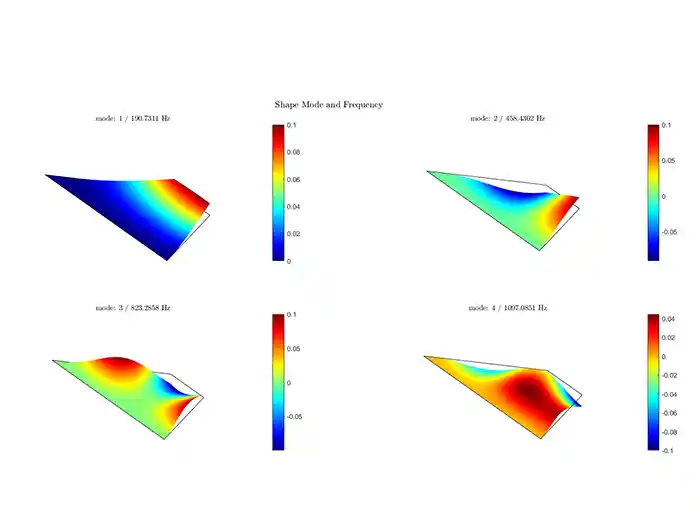
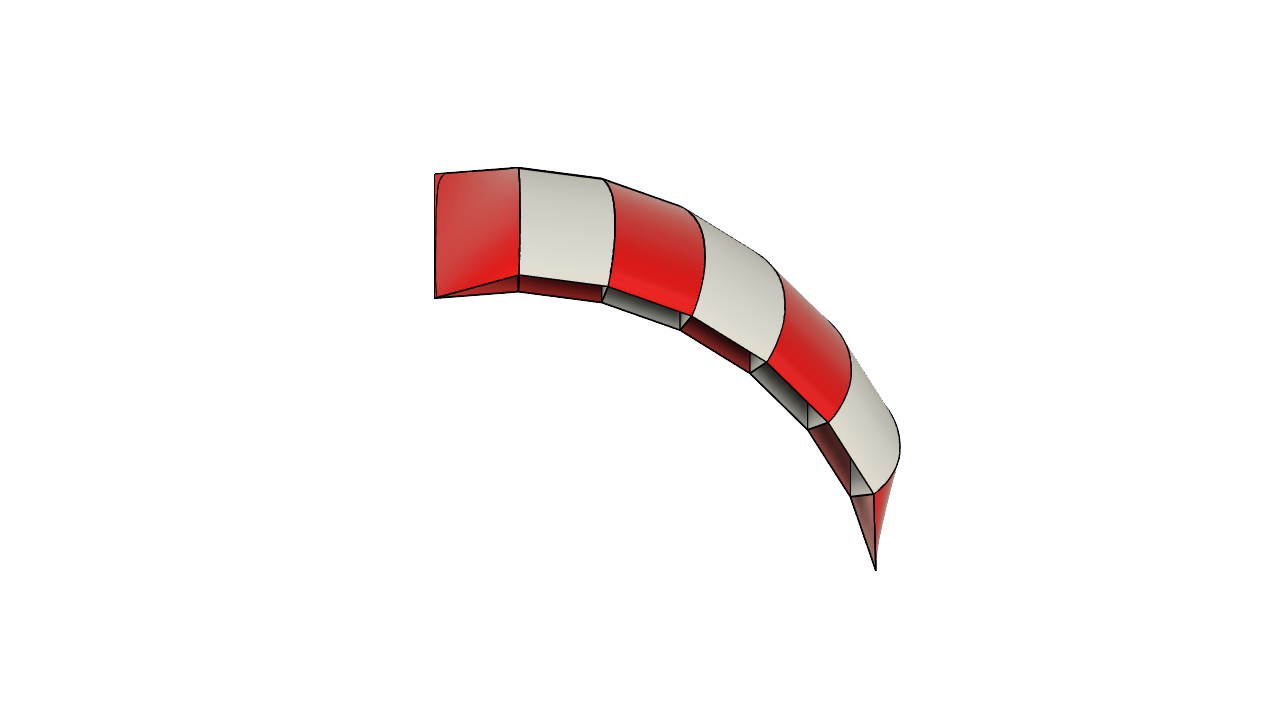
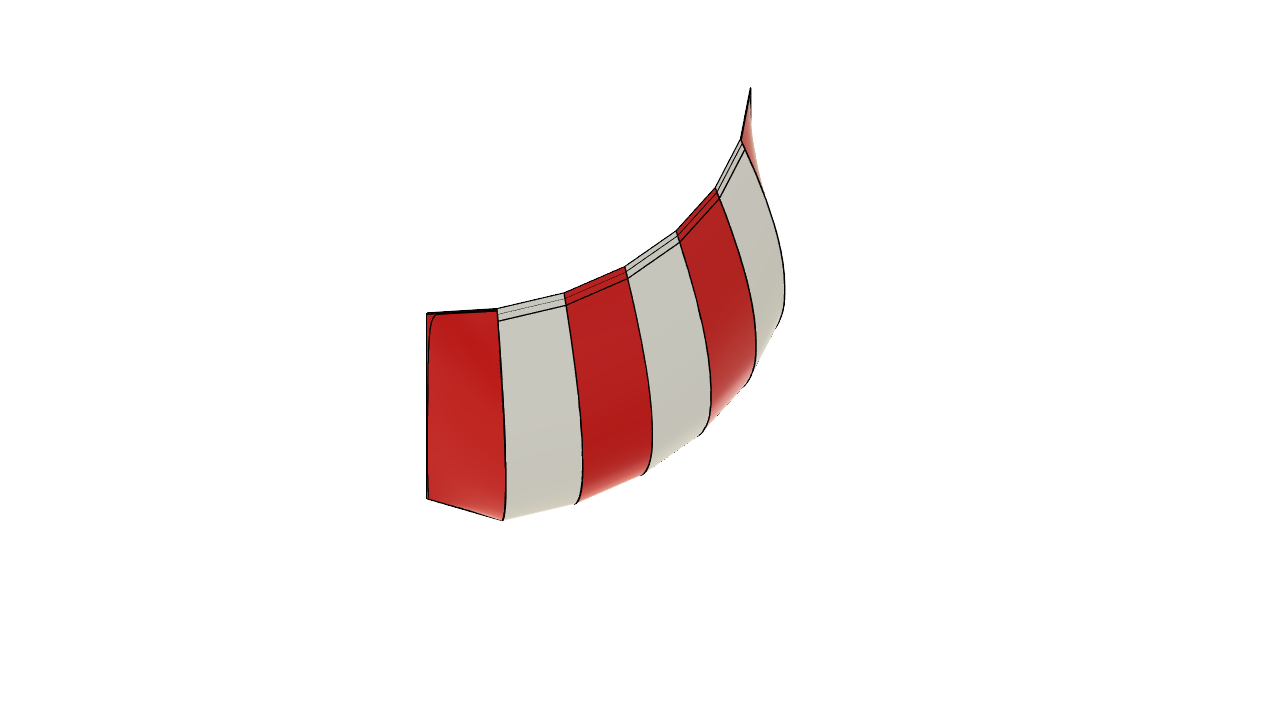
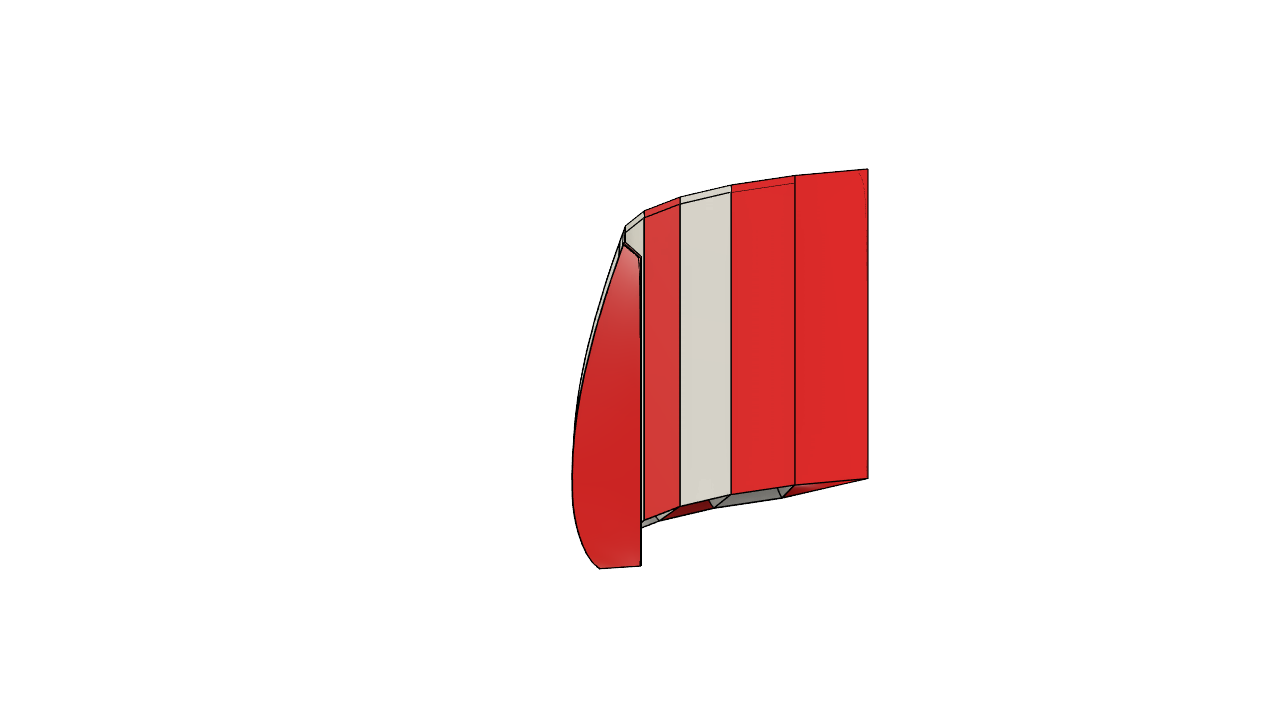
Structural dynamics and aeroelastic models
AeroElasticFins is completed as a structural solver, can construct the dynamic model of a generic fin. The fin can have whatever trapezoidal shape, with infinite type of material. The fin’s lay-up can be made by a combination of orthotropic and isotropic material. The structural solver uses linear, quadratic of cubic shape functions to construct the mass and stiffness matrix and can compute the eigenvalues and the corresponding eigenmodes of two thousand fins in less five minutes. Now we have developed an easy 2D model to compute flutter velocity, but we are trying to couple AeroElasticFins’s structural solver with a local Piston theory for the supersonic range, that is more in our interest. In order to validate our current and future model we have performed an aeroelastic analysis by using NASTRAN and compare the result with previous research paper.