Lynx
Our first competition rocket
Highlights
Overview
Lynx is the first competition rocket made by the association, taking part in the 2021 edition of the European Rocketry Challenge (EuRoC), in Portugal. It represents a giant step forward from our previous rockets, being much bigger, complex and reaching more than double the altitudes of previous launches.
Lynx made two incredible successful flights in 2021: a test flight in Roccaraso (Italy) and the EuRoC 2021 flight at the Santa Margarida military base in Portugal, reaching an apogee of 3076 m, just 2.5 % off the target of 3000 m.
This outstanding performance at EuRoC 2021 granted us two prizes:
- Second Overall Place
- Flight Award (3km COTS category)
- Team Award

EuRoC 2021 Results
Ranked
nd
FLIGHT AWARD
3km cots category
Team award
for team effort and sportsmanship
2.5 %
error from the target apogee
Roccaraso test flight
Lynx took flight for the first time in Roccaraso (AQ) in Italy, on the 18th of September 2021. This flight aimed at demonstrating the performance of all the subsystems of the rocket and validating the simulations.
Powered by a less powerful motor than the one used for EuRoC due to airspace restrictions, Lynx reached an apogee of 1500 m and was safely recovered after both the drogue and main chute deployed as expected.
Euroc Flight
Lynx finally took to the skies of Portugal as the second launch of EuRoC 2021 on the 13th of October.
It reached an apogee of 3076 m, just 2.5% off its target (and the closest overall during the whole event), before nominally deploying its parachutes and landing softly without a scratch, winning the first place in its category.











specs
Aerotech
M2000R

Structure
Lynx is a modular rocket, designed with ease of assembly in mind: the whole rocket can be integrated and be ready for launch in less than 2 hours!
Each section of the rocket is connected to the other with a custom connection flange, sized to withstand the loads experienced during the flight.
Most of the airframe is made of aluminum tubes, with the exception of the fins and the nosecone, where the team experimented with Carbon Fiber composites.


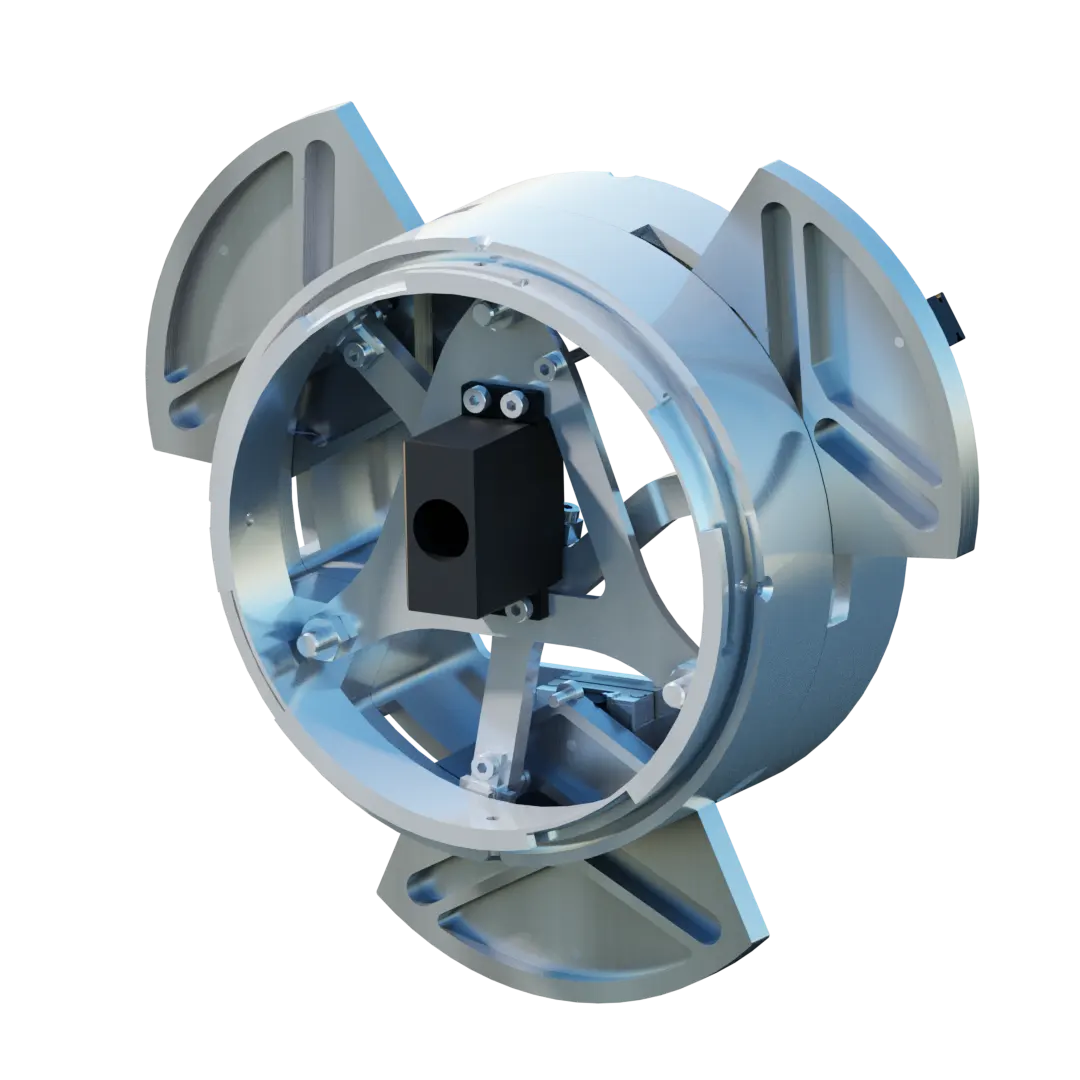
Air brakes
In order to precisely reach the target apogee of 3000m, Lynx uses an air brakes system to precisely control its speed.
During the flight, three aerodynamic surfaces are extented from inside the fuselage, controlled by a complex control algorithm that is capable of predicting how high the apogee will be, based on measurements from the onboard sensors, thus adjusting the trajectory of the rocket in real time.
Electronics bay
The electronics bay with its peculiar, transparent design, contains all the computers and electronics needed to operate Lynx both on the ground and during the flight.
The internal components are supported by three structural steel rods and protected from the outside environment by PETG panels.
On the inside are located the main flight computer (called the “Death Stack”), the backup flight computer, batteries and video camera.
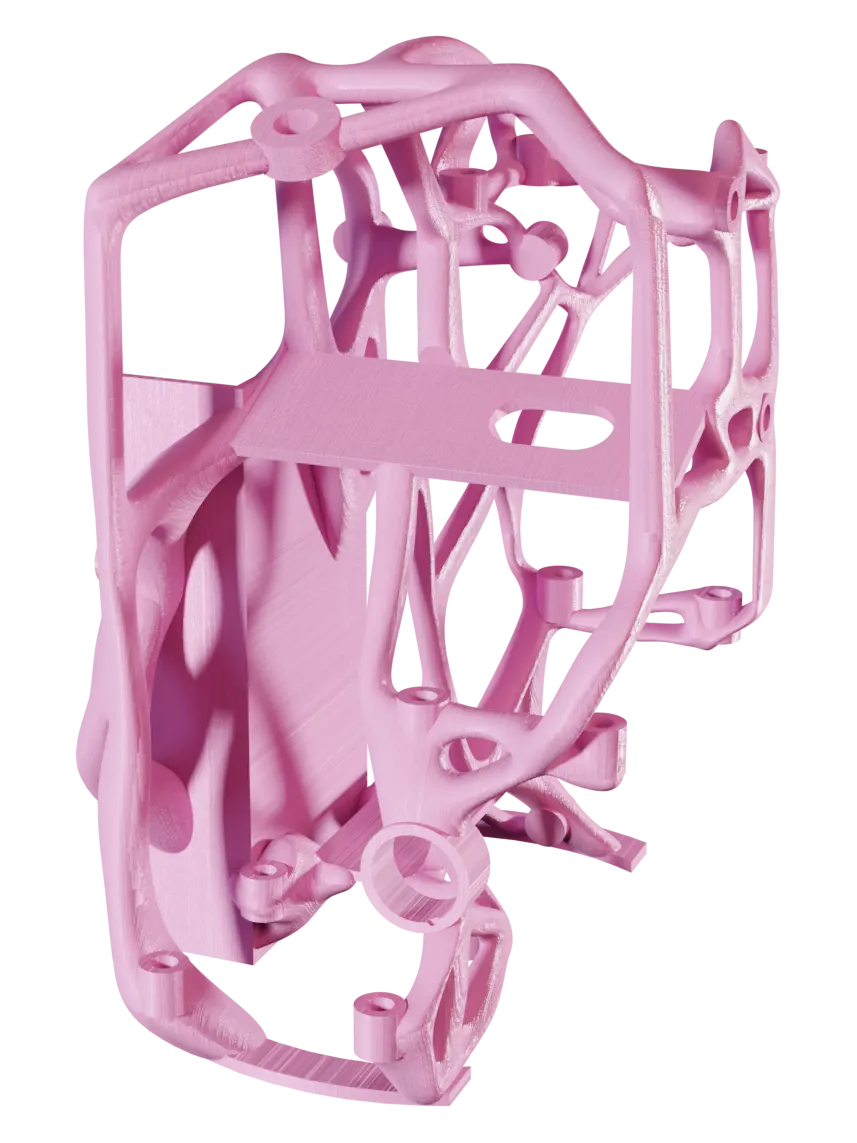
Most of the internal components are supported by the “Castle”, a topologically optimized structure manufactured with additive techniques.

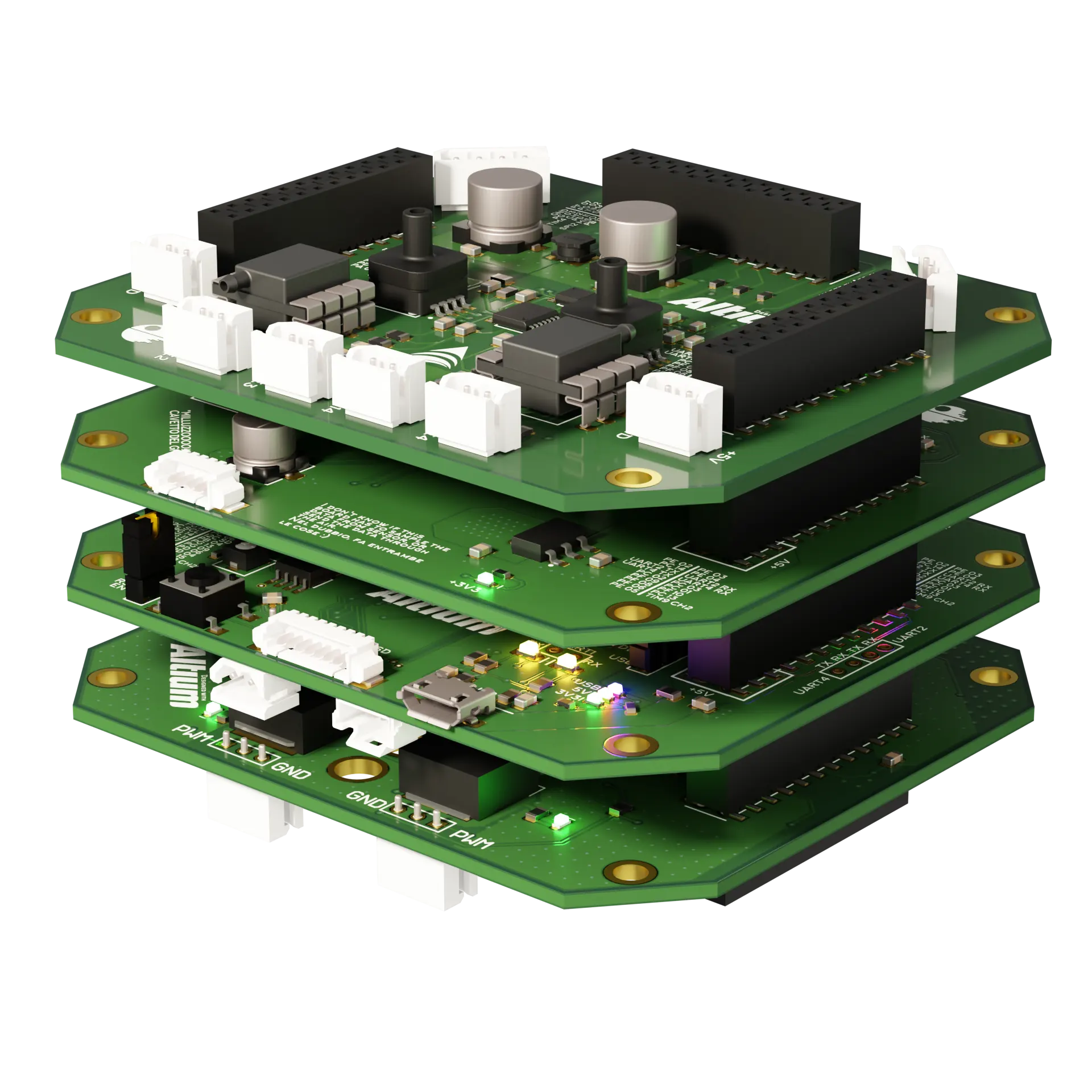
death stack
The death stack is Lynx’s main flight computer, completely designed in house by the team.
It is composed of four boards:
- The “Power” board, providing power to the stack, airbrakes and recovery systems
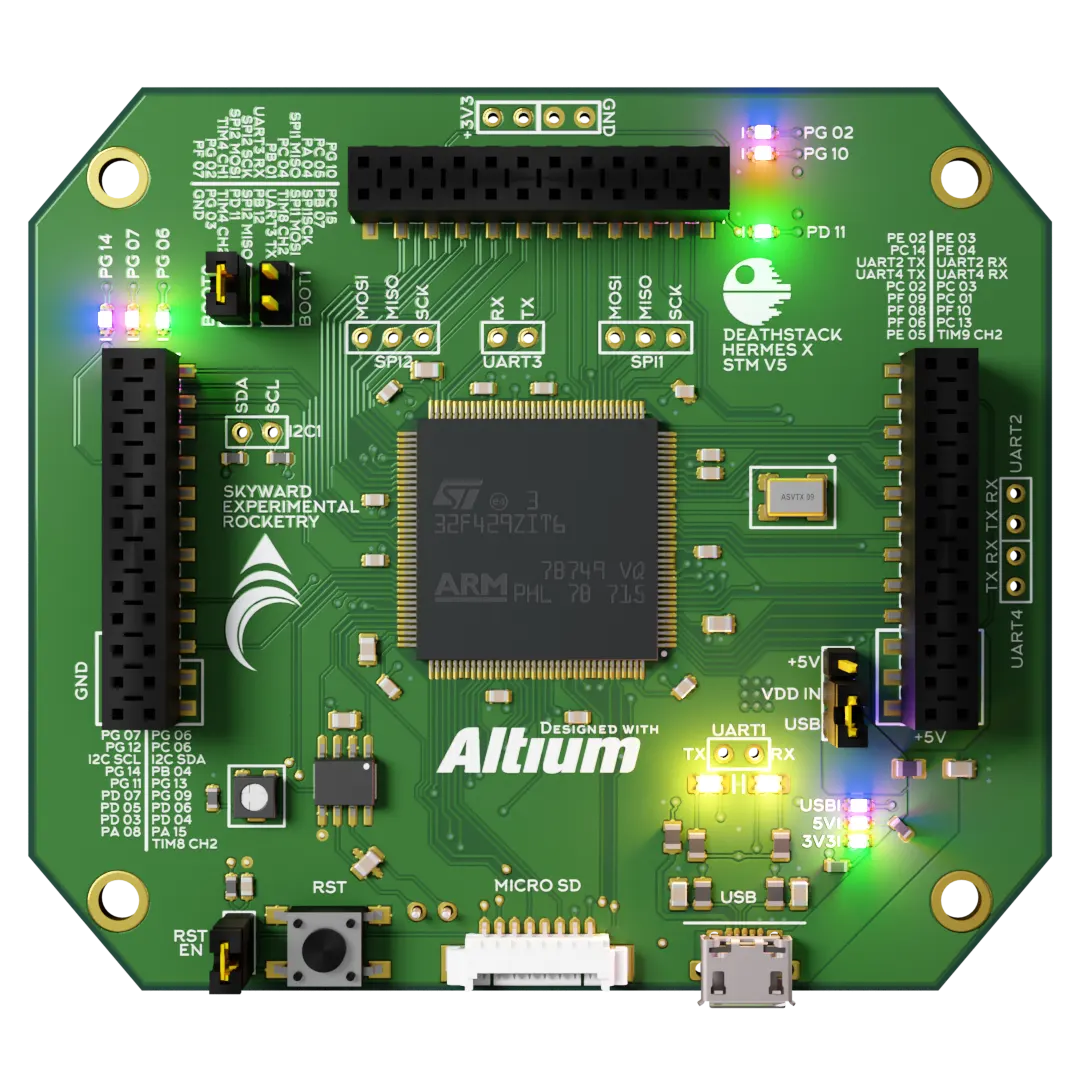
- The “STM” board, the brain of the stack, sporting a powerful STM32F4 microcontroller with 8 MB of RAM
- The “RF + IMU” board, with an Xbee SX868 module used for sending vital telemetry to the ground, and multiple 9 Axis Inertial Measurement Units
- The “Analog” board, with an ADC and many absolute and differential pressure sensors used to measure altitude and velocity of the rocket.
Software & control systems
The software that brings the death stack to life is also fully developed in house our members: running the Miosix Operating System, the code is able to sample sensors at high frequency, logging the data to an onboard memory and beaming it to the ground via radio, while also calculating the state of the rocket thanks to the “Navigation System”.
The Navigation System is an algorithm used to estimate the position and orientation of the rocket in real time during the flight. These estimates are then feeded into the airbrakes control algorithm for precise control of the trajectory.
The software also performs the mission-critical task of commanding the recovery systems, by detecting the apogee within a short time window and detecting the main chute deployment altitude.
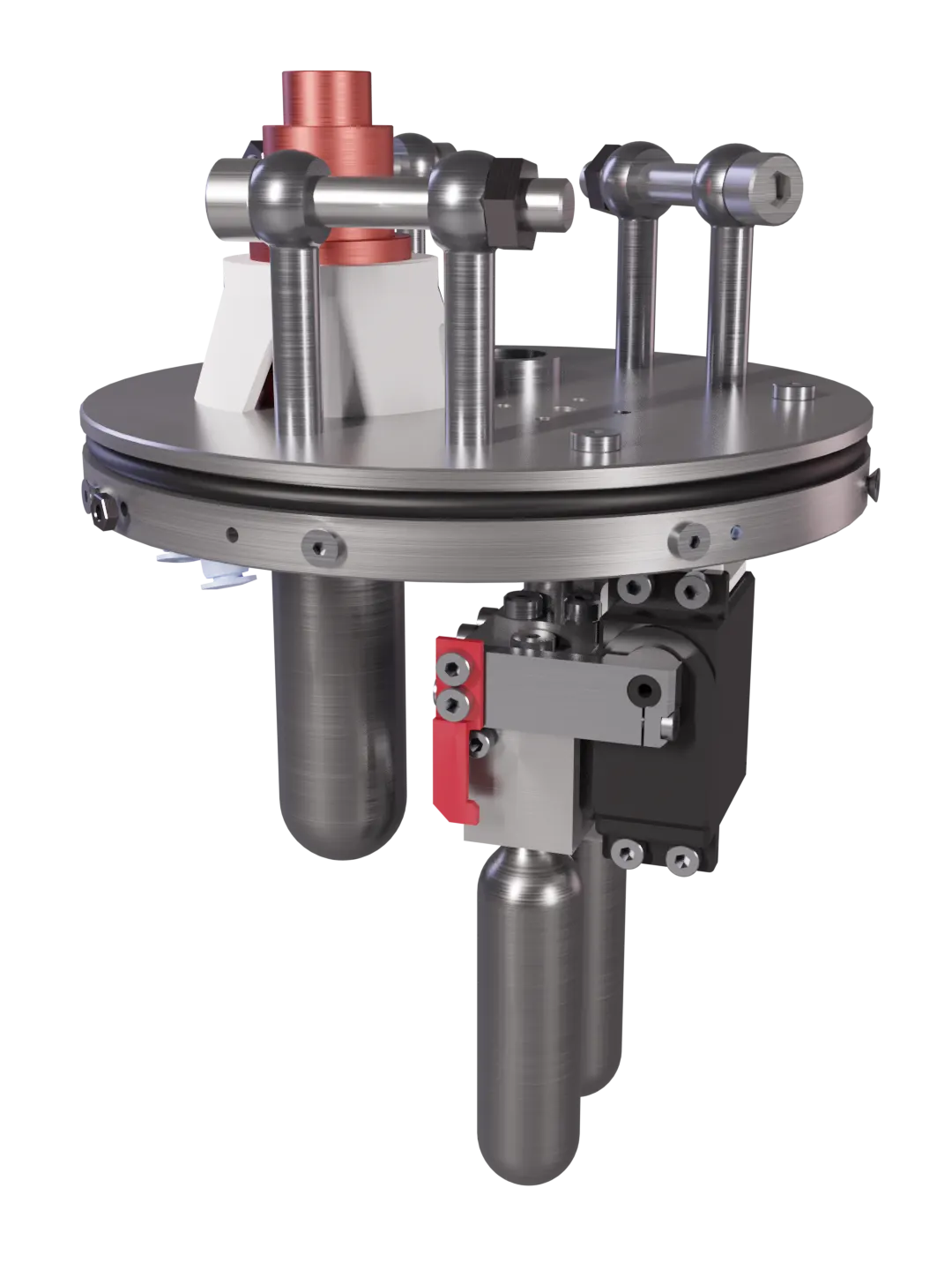
Recovery systems
The main mission objective is to safely recover the rocket after each flight. That’s why Lynx employs dual redundancy for the recovery actuation systems: the death stack controls our custom expulsion system, a pneumatic valve actuated by a servomotor releasing high-pressure CO2, while the secondary (COTS) computer actuates a COTS ejection system.
Lynx also employs a dual stage parachute system: the drogue parachute is deployed at apogee and slows the rocket down to about 100 Km/h. Once the rocket reaches an altitude of about 400 m from the ground, the drogue is cut, initiating the deployment of the main parachute, further slowing the rocket to a speed of 15 Km/h and bringing it to a soft landing.