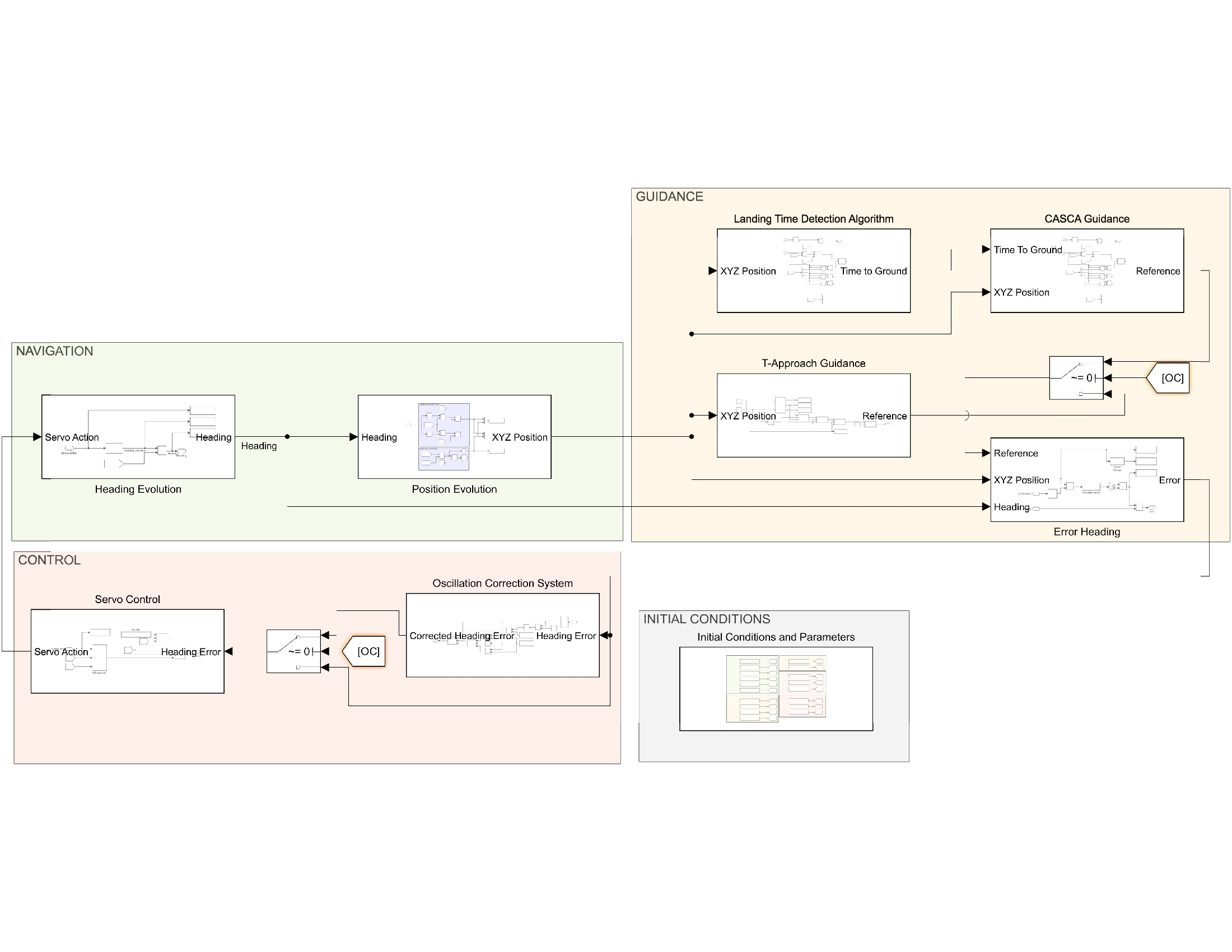
Guidance
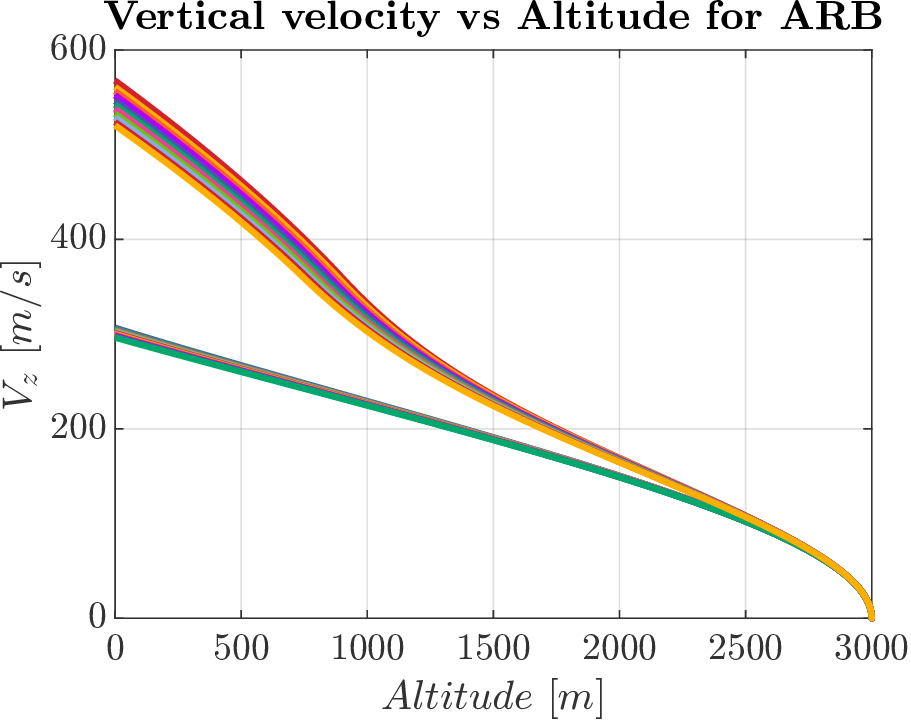
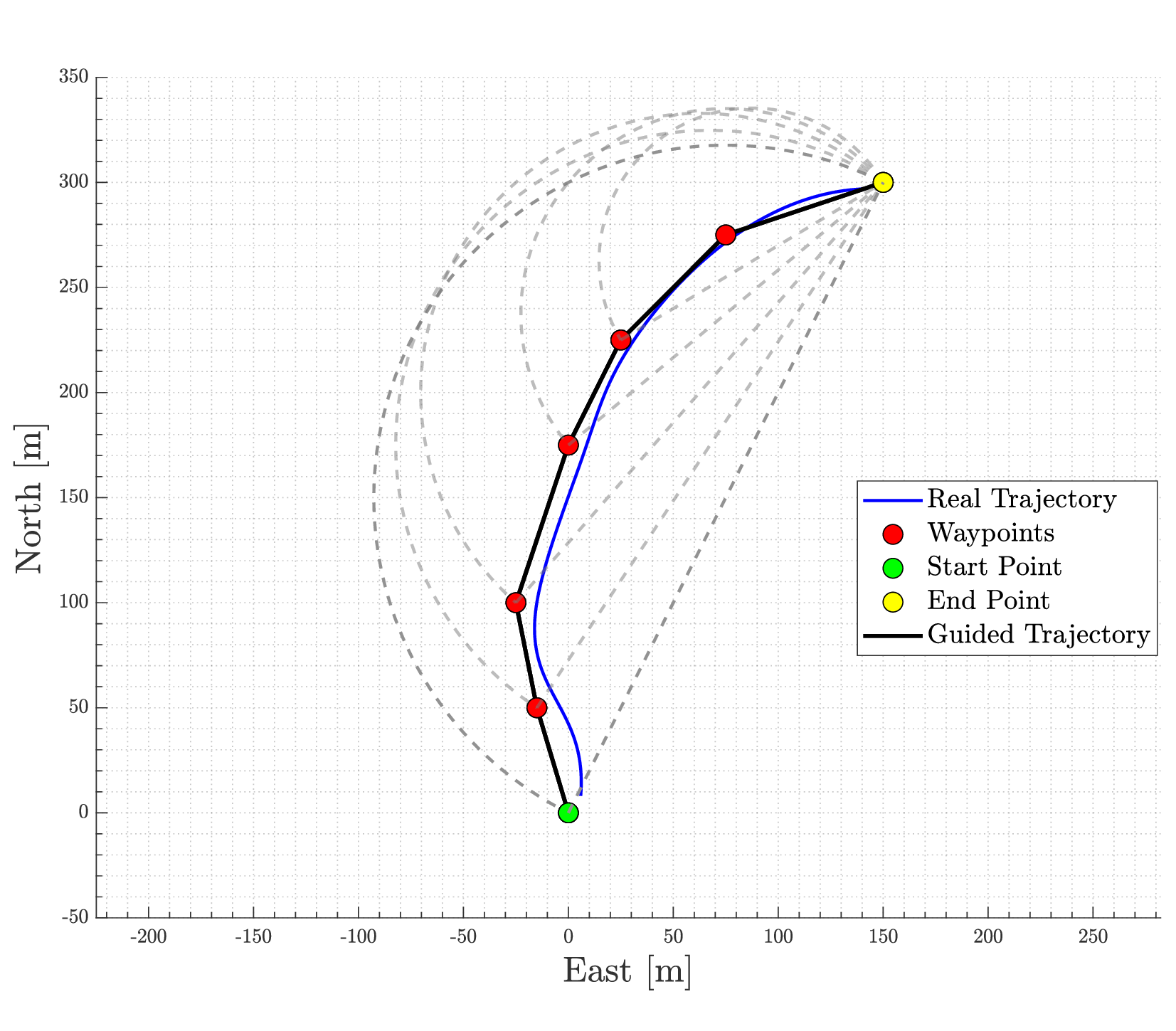
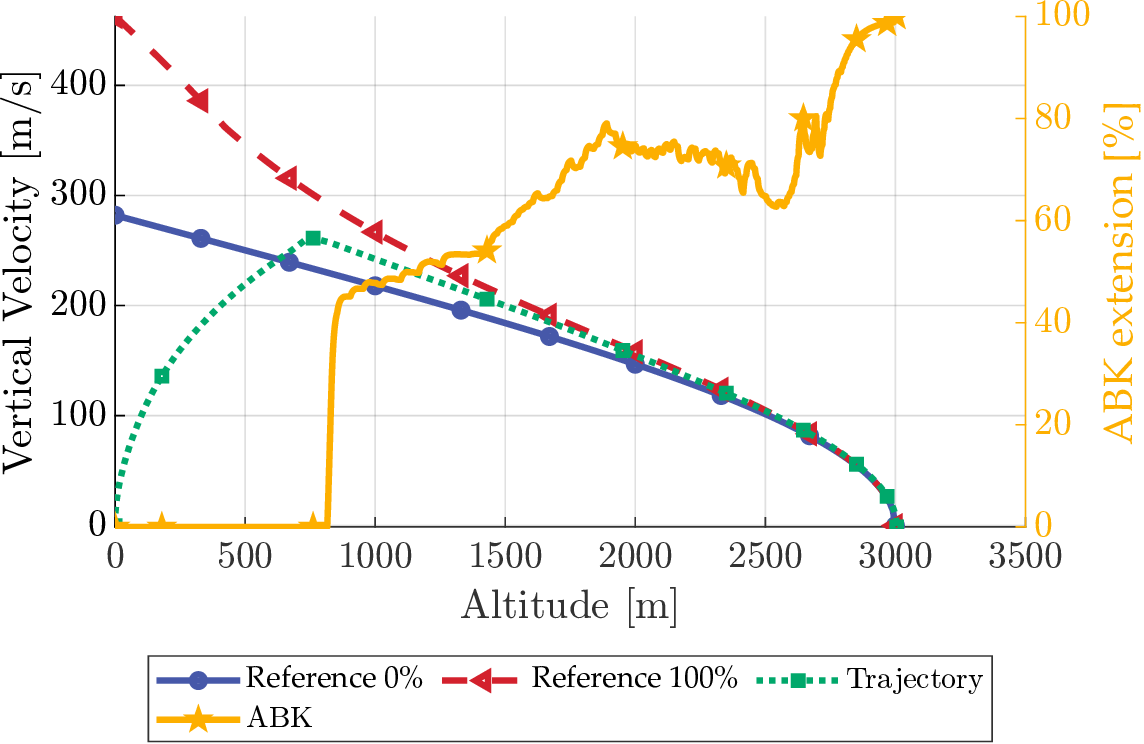
The Guidance subsystem is responsible for determining the reference trajectory for both the rocket and the parafoil, based on the state estimates provided by the Navigation subsystem. This trajectory enables the Control subsystem to apply corrective or control actions to maintain the desired flight path. A critical element for mission success is the actuation of the airbrakes, achieved through interpolation between reference trajectories computed with maximum and minimum opening, depending on the estimated mass and vertical velocity. Similarly, during the guided recovery descent, the Controlled Altitude System for Canopy Adjustments (CASCA) directs the parafoil towards the target by interpolating between curves with maximum and minimum turn rates, selected based on altitude and distance from target location.