The Aeroelasticity and Structural Dynamics IPT was founded in September of 2021 to better study the structural dynamics and the aeroelasticity field of the rocket, as we also improved our knowledge regarding the internal stresses during both the main and drogue parachute opening phases. A main future goal of ours is to refine our program by taking into account all aerodynamic forces and studying the entire flight envelope, while this year we will primarily be working to develop AeroElasticFins: a robust and reliable program for the fin flutter speed of the rocket, developed in Python through Matlab, that is both extremely fast and easy to work with.
AeroElasticFins
AeroElasticFins is a structural solver, which can construct the dynamic model of a generic fin, with any trapezoidal shape and made out of any material. The fin’s lay-up can be made by a combination of orthotropic and isotropic material. The structural solver uses linear, quadratic or cubic shape functions to construct the mass and stiffness matrix and can compute the eigenvalues and the corresponding eigenmodes of 2000+ fins in less than five minutes.
Flutter Analysis
The flutter speed phenomenon is caused by the interactions between the structure of the rocket and the aerodynamic field, and is therefore not easy to compute. So far we have developed a basic 2D model to predict this instability, but we are trying to include Local Piston Theory for the supersonic range into AeroElasticFins to more accurately model its effects. In order to validate our current and future models we have performed an aeroelastic analysis through NASTRAN and compared the results with previous research papers.
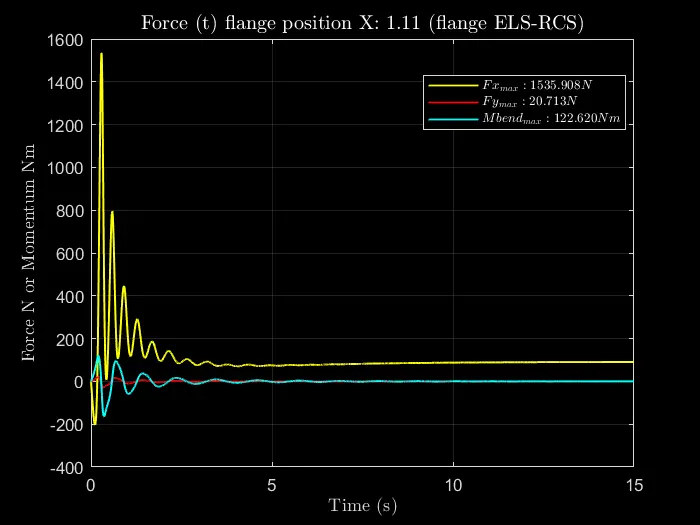
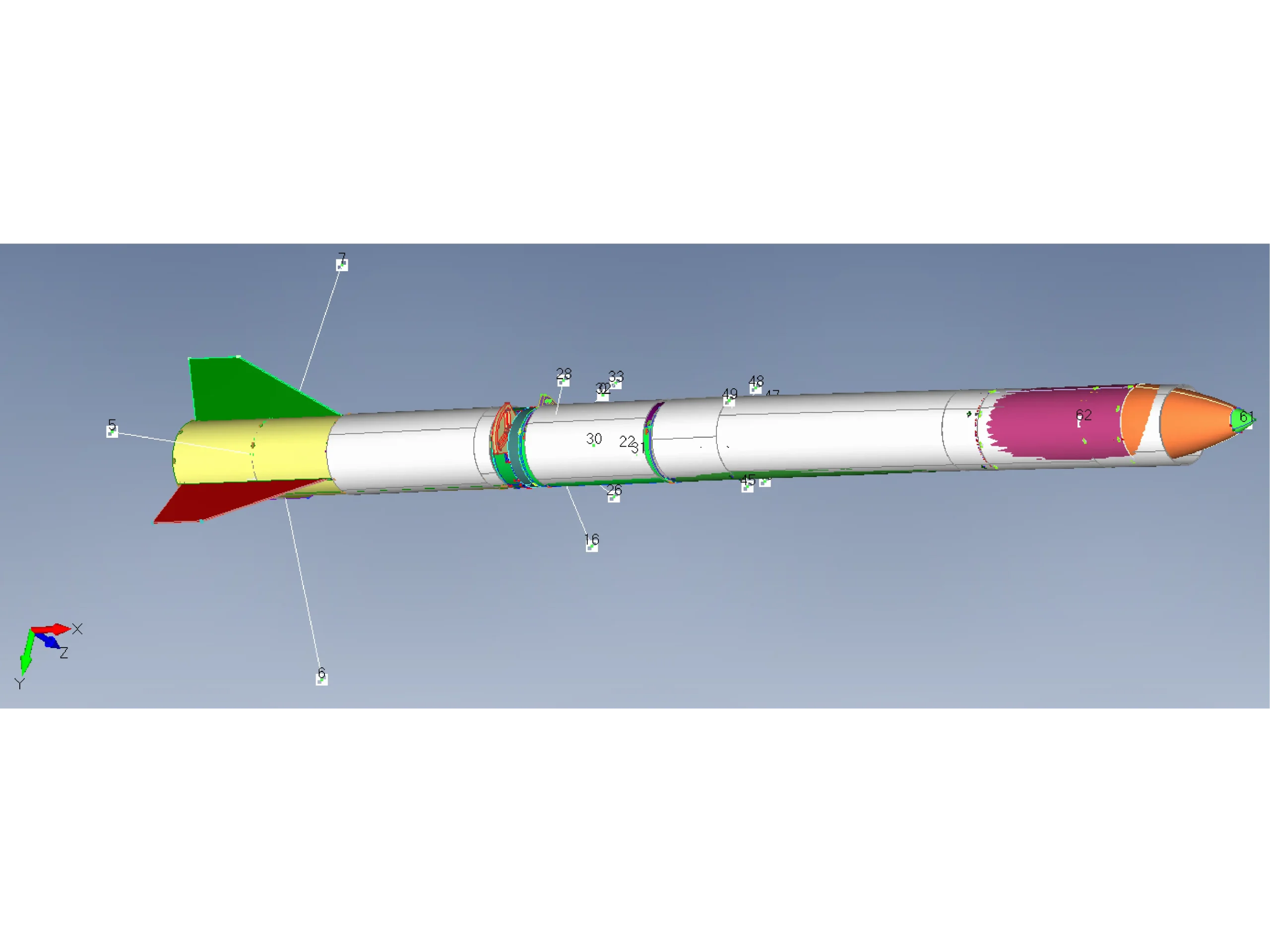
Vibration and
Load Analysis
As the rocket is composed of five separate modules connected by flanges, it is critical to calculate the maximum internal loads for each component. Last year we incorporated a dynamic model of the parachute-opening phase, though this year we will employ a separate solution, and completed eigenvalues computations of the entire rocket. The CAD model is composed of 2000+ parts, so it has been necessary to simplify it by making some assumptions about how the mechanical structures behave and by substituting all small, distributed mass, with a point mass model.
Requirements
Base:
・Theoretical knowledge of structural
mechanics
・Basic knowledge of aerodynamics
・Basic knowledge of the programming language Matlab, Python or similar
for scientific computing
Advanced:
・Solid knowledge of structural mechanics
and structural dynamics
・Solid knowledge of aerodynamics and aeroelastic phenomena
・Knowledge of finite element analysis software for structural and aeroelastic analysis (Nastran, Abaqus, ...)